


Hard skills include essential competencies such as lesson planning, grading assessments, and facilitating discussions that support the learning experiences of undergraduate students.
Undergraduate Teaching Assistant Resume Examples & Templates
Looking to stand out as an undergraduate teaching assistant? Our undergraduate teaching assistant resume examples showcase essential skills like communication, organization, and mentorship that will catch employers' attention.

by Gabriela Hernandez, Last Updated: January 18, 2026
Hired By:*

- Popular Undergraduate Teaching Assistant Resume Examples
- Resume Template—Easy to Copy & Paste
- Build Your Resume in Minutes
- How to Write a Undergraduate Teaching Assistant Resume Summary
- Showcasing Your Work Experience
- Top Skills to Include on Your Resume
- Resume Format Examples
- Related Teaching Resume Examples
- Frequently Asked Questions
- Should I include a cover letter with my undergraduate teaching assistant resume?
- Can I use a resume if I’m applying internationally, or do I need a CV?
- What soft skills are important for undergraduate teaching assistants?
- I’m transitioning from another field. How should I highlight my experience?
- Where can I find inspiration for writing my cover letter as a undergraduate teaching assistant?
- How do I write a resume with no experience?
Popular Undergraduate Teaching Assistant Resume Examples
Check out our top undergraduate teaching assistant resume examples that emphasize key skills such as communication, organization, and subject expertise. These examples will help you effectively present your contributions in an academic setting.
Ready to build your own impressive resume? Our Resume Builder offers user-friendly templates tailored for educational roles, making it easy to highlight your strengths.
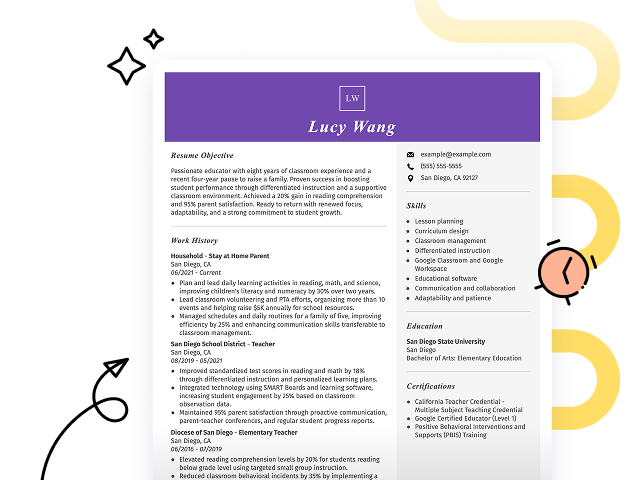
Entry-level undergraduate teaching assistant resume
What this resume does well:
This entry-level resume effectively highlights the job seeker's teaching and instructional skills, showcasing their ability to improve student engagement and academic performance through innovative methods and support programs. New professionals in this field must demonstrate a strong commitment to student success and effective communication abilities, even when faced with limited direct teaching experience.
Mid-career undergraduate teaching assistant resume
What this resume does well:
This resume showcases the applicant's strong qualifications through measurable achievements and leadership in educational roles. The focus on improving student performance and developing learning tools highlights their readiness for greater responsibilities and complex challenges in academia.
Experienced undergraduate teaching assistant resume
What this resume does well:
The work history section highlights the applicant’s significant contributions in educational roles, particularly as an Undergraduate Teaching Assistant where they developed quizzes that improved scores by 15%. The clear bullet point format improves readability, making it easy for hiring managers to quickly assess their achievements and impact.
Resume Template—Easy to Copy & Paste
Example
Hiro Patel
Eastside, WA 98013
(555)555-5555
Hiro.Patel@example.com
Professional Summary
Results-driven Teaching Assistant with 7 years in educational support. Specialized in curriculum development and student engagement, enhancing learning outcomes by up to 25%.
Work History
Undergraduate Teaching Assistant
Springfield University - Eastside, WA
January 2024 - December 2025
- Coordinated study sessions for 30 students weekly
- Improved student engagement by 15%
- Developed teaching aids that increased scores by 20%
Academic Tutor
Learner's Edge - Tacoma, WA
January 2017 - January 2024
- Guided 50+ students in mathematics
- Boosted student grades by up to 25%
- Designed curriculum improvements for better learning
Education Instructor
Knowledge Hub - Eastside, WA
January 2015 - January 2017
- Facilitated workshops for 100 participants annually
- Achieved 90% student satisfaction scores
- Implemented interactive modules increasing retention
Languages
- Spanish - Beginner (A1)
- French - Intermediate (B1)
- German - Beginner (A1)
Skills
- Student Assessment
- Curriculum Development
- Classroom Management
- Educational Technology
- Lesson Planning
- Verbal Communication
- Collaborative Teaching
- Critical Thinking
Certifications
- Classroom Technology Specialist - National Education Association
- Teaching Assistant Certification - American Federation of Teachers
Education
Master of Arts Education
Springfield University Springfield, Illinois
June 2014
Bachelor of Science Teaching
Community College Springfield, Illinois
June 2012
Build Your Resume in Minutes
Creating a custom resume is easier than ever with our Resume Builder!
How to Write a Undergraduate Teaching Assistant Resume Summary
Your resume summary is the first thing employers will notice, so it’s important to make a positive impression that highlights your qualifications. For an undergraduate teaching assistant, you'll want to showcase your academic achievements and teaching skills effectively.
This role requires you to emphasize your ability to support faculty and engage with students, demonstrating both knowledge and enthusiasm. The following examples will illustrate what makes a strong resume summary for this position, helping you identify key elements that stand out:
Weak Example
I am a dedicated undergraduate teaching assistant with some experience in helping students. I hope to find a position where I can use my skills and contribute positively to the academic environment. A supportive team and opportunities for professional development are important to me.
Why this summary misses the mark:
- Lacks specific examples of skills or experiences that highlight what the applicant offers as an assistant
- Overuses personal language and fails to showcase measurable achievements, which weakens the impact
- Emphasizes personal desires instead of detailing how they can support student learning and faculty objectives
Strong Example
Enthusiastic undergraduate teaching assistant with 2 years of experience in supporting course instruction and improving student learning in a dynamic academic environment. Successfully increased student engagement by 20% through innovative tutoring techniques and organized collaborative study sessions. Proficient in course management software, lesson planning, and fostering an inclusive classroom atmosphere.
Why this summary works:
- Begins with clear experience duration and role-specific context
- Highlights quantifiable achievement that illustrates impact on student engagement
- Mentions relevant technical skills important for supporting educational processes
Pro Tip
If you’re new to the job market, consider crafting a career objective instead of a summary. This approach can highlight your enthusiasm and goals. Take a look at resume objective examples tailored to your field for inspiration.
Showcasing Your Work Experience
The work experience section is important for your resume as an undergraduate teaching assistant, and it will contain the bulk of your content. Good resume templates always prioritize this section to highlight relevant experiences.
This part should be arranged in reverse-chronological order, listing your previous roles clearly. Use bullet points to detail your responsibilities and achievements in each position.
To help you understand what works effectively, we’ve put together a couple of examples that demonstrate strong work history entries for undergraduate teaching assistants. These examples will clarify what stands out and what to avoid:
Weak Example
Undergraduate Teaching Assistant
State University – Anytown, USA
- Helped students with classwork
- Organized study materials and sessions
- Assisted the professor during lectures
- Provided feedback on assignments
Why this work experience section misses the mark:
- Lacks specific employment dates
- Bullet points emphasize basic tasks rather than effective contributions
- No mention of any measurable outcomes or achievements
Strong Example
Undergraduate Teaching Assistant
University of Knowledge – Cityville, ST
September 2021 - May 2023
- Facilitated weekly study sessions for a class of 30 students, increasing average exam scores by 15% over two semesters
- Assisted professors in developing course materials and assignments, improving curriculum effectiveness and student engagement
- Provided individualized support to students during office hours, improving their understanding of complex concepts and boosting confidence
Why this work experience section works:
- Starts each bullet with strong action verbs that clearly communicate the job seeker's impact
- Incorporates quantifiable results to illustrate effectiveness in supporting student learning
- Highlights relevant skills such as collaboration and communication essential for teaching roles
While your resume summary and work experience are important components, don’t overlook the importance of other sections. Each part plays a role in showcasing your qualifications effectively. For more detailed guidance, check out our extensive guide on how to write a resume.
Top Skills to Include on Your Resume
A well-crafted skills section is vital for any resume as it succinctly showcases your key qualifications and strengths. This focused area helps job seekers present their capabilities while allowing employers to quickly gauge potential fit.
By highlighting relevant skills, hiring managers can efficiently evaluate whether applicants meet essential criteria for the role. For undergraduate teaching assistant professionals, it's important to include both hard and soft skills that reflect your educational expertise and interpersonal abilities, which will be discussed further below.
Soft skills are essential for undergraduate teaching assistants because they foster effective communication, adaptability, and teamwork, which improve the learning experience for students and support a collaborative classroom environment.
When selecting skills for your resume, it's important to align them with what employers expect. Many organizations use automated screening systems that filter out job seekers lacking essential resume skills, so prioritize those that match the job requirements.
To effectively highlight your qualifications, carefully review job postings for insights on which skills are most valued. This approach ensures your resume resonates with recruiters and passes through applicant tracking systems without a hitch.
Pro Tip
Ensure your resume stands out to hiring managers by using our ATS Resume Checker, which spots over 30 common mistakes that could hold you back, helping your application glide through those applicant tracking systems.
10 skills that appear on successful undergraduate teaching assistant resumes
Highlighting essential skills on your resume can significantly improve your appeal to recruiters looking for undergraduate teaching assistants. These in-demand abilities are showcased in our resume examples, giving you the confidence to apply effectively.
Here are 10 skills that can make your resume more attractive if they align with your experience and job requirements:
Effective communication
Adaptability
Team collaboration
Time management
Leadership qualities
Attention to detail
Problem-solving abilities
Research skill
Classroom management
Technological literacy
Based on analysis of 5,000+ teaching professional resumes from 2023-2024
Resume Format Examples
Selecting the appropriate resume format is important for undergraduate teaching assistants, as it highlights relevant educational achievements and teaching experiences that align with their career goals.
Entry-Level 0 - 2 years
Functional
Focuses on skills rather than previous jobs
Best for:
Recent graduates and career changers with limited experience in education
Mid-Career 3 - 7 years
Combination
Balances skills and work history equally
Best for:
Mid-career professionals focused on demonstrating their skills and growth potential
Experienced 8+ years
Chronological
Emphasizes work history in reverse order

Best for:
Experienced educators excelling in mentorship and curriculum development
Frequently Asked Questions
Should I include a cover letter with my undergraduate teaching assistant resume?
Absolutely, including a cover letter is essential as it allows you to highlight your qualifications and demonstrate enthusiasm for the position. It’s an opportunity to connect personally with hiring managers. For tips on crafting an effective cover letter, explore our guide on how to write a cover letter. Alternatively, use our Cover Letter Generator for a quick start.
Can I use a resume if I’m applying internationally, or do I need a CV?
When applying for jobs abroad, use a CV instead of a resume to showcase your academic background and detailed work experience. Explore our comprehensive resources on how to write a CV and view some helpful CV examples to ensure your application stands out in the global job market.
What soft skills are important for undergraduate teaching assistants?
Soft skills, including interpersonal skills like communication, patience, and adaptability, are essential for undergraduate teaching assistants. These abilities enable you to effectively support students, foster a collaborative classroom environment, and navigate diverse learning needs, ultimately improving the educational experience for everyone involved.
I’m transitioning from another field. How should I highlight my experience?
Highlight your transferable skills such as communication, organization, and teamwork from previous roles. These qualities illustrate your ability to support faculty and students effectively, even if you lack direct teaching experience. Share specific instances where you've managed projects successfully or collaborated with others to show how these accomplishments relate to the responsibilities of an undergraduate teaching assistant.
Where can I find inspiration for writing my cover letter as a undergraduate teaching assistant?
For those applying for undergraduate teaching assistant roles, exploring well-crafted cover letter examples can be incredibly beneficial. These samples offer valuable insights on content ideas, formatting tips, and how to effectively showcase your qualifications, helping you stand out as an applicant.
How do I write a resume with no experience?
Creating a resume with no experience for undergraduate teaching assistant positions is achievable by highlighting relevant coursework, tutoring, and any volunteer roles. Emphasize your communication skills, leadership in group projects, and enthusiasm for education. Employers value your passion and potential, so showcase what you bring to the table.

Ready to land the job?
Join 28M+ others who've built a resume that works.